

 联系我们
联系我们

川崎机器人:DELMIA软件机器人行走轴添加与配置
为了扩大机器人的工作范围,通常情况下机器人工作站中会添加机器人行走轴或是添加变位机等外部设备,在DELMIA软件中也可以为机器人添加行走轴并对机器人进行仿真操作,本期就来为大家介绍一下机器人行走轴的添加与配置。
一、川崎机器人行走轴添加:
打开DELMIA软件的“Device Task Definition”模块,然后使用左侧工具条中的“Catalog Browser”工具,从软件的机器人库中添加机器人与机器人行走轴,这里以KUKA机器人系列中的机器人KR100-P与行走轴KL1500_2为例进行演示。
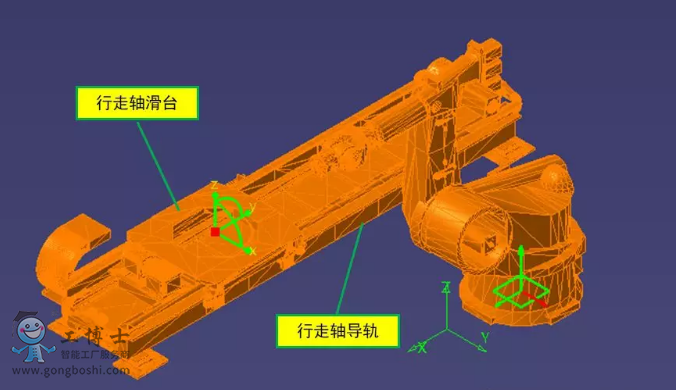
1.使用下方的“Snap Resource to where by using position toolbar”命令,将机器人安装到行走轴滑台上。说明:安装机器人时选取的安装参考坐标系如下图所示,机器人行走轴主要部件即行走轴滑台与行走轴导轨,通常情况下行走轴的滑台上都会有安装参考标志物(如定位孔、定位销等),本例选取的行走轴滑台机器人安装参考标志物为一个八边形,安装时一定要让机器人的Base中心与行走轴滑台的中心重合。
机器人行走轴一般情况下都是通过机器人进行控制的,因此这里需要配置机器人与行走轴之间的关联关系。
1.点击下方Robot Controller工具条中的“Define Auxiliary devices”命令按钮,弹出Define Auxiliary devices对话框。

说明:Available types是选择机械装置的类型,可用类型如下:End of arm tooling:手臂工具末端类型,即作为机器人的外部轴Rail/Track/Gantry:轨道或是龙门架;Workpiece Positioner:工件变位机;Conveyor:输送带。

4.行走轴自身的参数也可以进行配置,如行走轴远点位置、行走轴行程、工作标志位等。走测浏览树中双击机器人行走轴KL1500_2,软件切到“Device Building”模块。使用左侧Device Attributes工具条中的“Travel Limits”命令可以设置机器人行走轴的行程,使用“Home Poisitions”命令可以设机器人行走轴的原点、工作标志位,可根据需要酌情配置。
5.参数配置完成后,双击左侧浏览树中ProcessList下的工艺文件Process,软件切换回“Device Task Definition”模块。
四、机器人示教编程
机器人行走轴的运动可以通过机器人示教器进行示教编程来完成,当把行走轴配置为机器人的外部轴的时候,行走轴除了自身独立运行以外,也可以与机器人联动,实现插补运行。
1.首先使用“New Task”命令为机器人创建一个任务,然后在Robot Management工具条中的“Teach a device”命令对机器人与机器人行走轴进行示教编程。
2.为机器人行走轴示教编程时,可以勾选示教编程对话框中的“Jog”选项,在打开的Jog对话框中手动移动机器人行走轴到合适位置,然后在对移动好的位置进行示教编程。
3.这里为机器人与机器人行走轴示教了一些演示用的位置点,运行轨迹与程序如下图所示。
4.当然,这里也可以对机器人以及行走轴的速度进行创建设置。点击Robot Controller工具条中的“Motion Profile”命令按钮,然后点击左侧浏览树中的机器人KR100-P,在打开的Motion Profile对话框中可以对机器人运行速度进行创建。
5.新速度创建完成后,在示教编程对话框中右击需要修改速度的机器人程序,在弹出的快捷菜单中的Motion Profile选项下可以选择新创建的速度选项。
注:当机器人与行走轴(外部轴)联动插补运行时,机器人或行走轴的*终运行速度将以设置的*小速度为准。
五、机器人仿真运行
机器人与行走轴运行程序编写完成后即可进行仿真运行测试。
1.将机器人与机器人行走轴恢复到初始位置,然后点击Simulation工具条中的“Save Initial State”命令按钮,保存所有设备的初始位置。
2.使用“Robot Task Simulation”命令,可以对机器人与行走轴进行仿真运行测试。
更多信息请咨询:川崎机器人